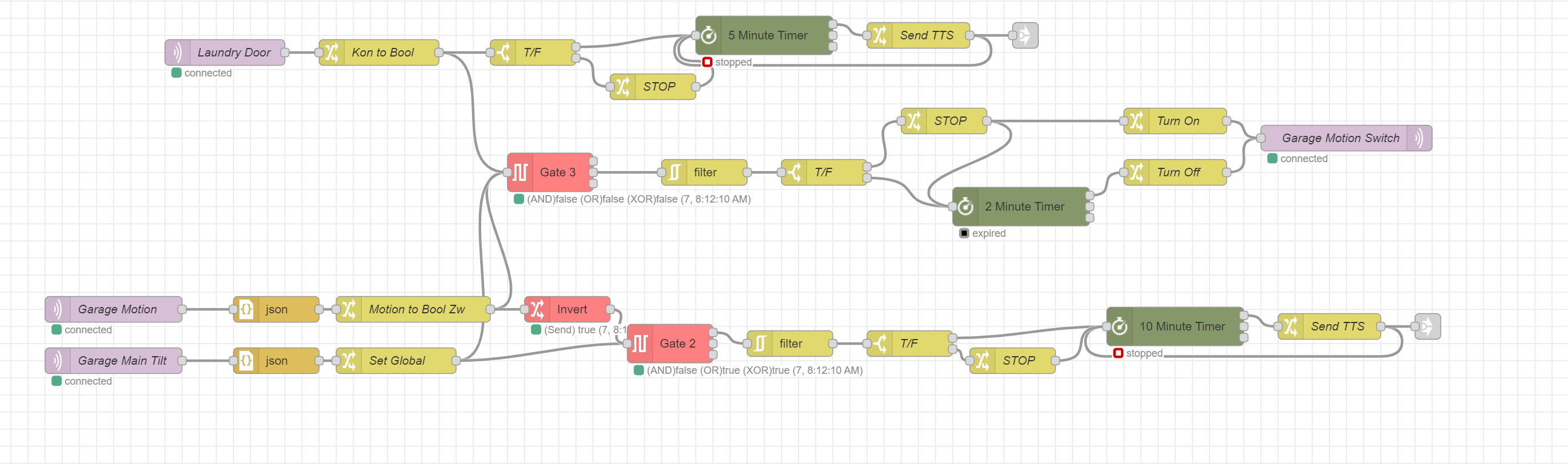
here is my flow, either garage door, door to house or the motion switch can turn it on, all odd turn it off.
Summary
[{“id”:“abf3adced1ccd0b0”,“type”:“mqtt out”,“z”:“435c92a78cd0624d”,“name”:“Garage Motion Switch”,“topic”:“zwave/Garage/Garage_Motion_Switch/37/0/targetValue/set”,“qos”:“2”,“retain”:“”,“respTopic”:“”,“contentType”:“”,“userProps”:“”,“correl”:“”,“expiry”:“”,“broker”:“3f792c51bc3d4765”,“x”:1640,“y”:180,“wires”:[]},{“id”:“ce266fb68dbf7f7c”,“type”:“change”,“z”:“435c92a78cd0624d”,“name”:“Turn Off”,“rules”:[{“t”:“set”,“p”:“payload”,“pt”:“msg”,“to”:“false”,“tot”:“bool”}],“action”:“”,“property”:“”,“from”:“”,“to”:“”,“reg”:false,“x”:1440,“y”:220,“wires”:[[“abf3adced1ccd0b0”]]},{“id”:“1c4ab67afdd8396b”,“type”:“change”,“z”:“435c92a78cd0624d”,“name”:“Turn On”,“rules”:[{“t”:“set”,“p”:“payload”,“pt”:“msg”,“to”:“true”,“tot”:“bool”}],“action”:“”,“property”:“”,“from”:“”,“to”:“”,“reg”:false,“x”:1440,“y”:160,“wires”:[[“abf3adced1ccd0b0”]]},{“id”:“374179a1098fc906”,“type”:“change”,“z”:“435c92a78cd0624d”,“name”:“STOP”,“rules”:[{“t”:“set”,“p”:“payload”,“pt”:“msg”,“to”:“stop”,“tot”:“str”}],“action”:“”,“property”:“”,“from”:“”,“to”:“”,“reg”:false,“x”:1170,“y”:160,“wires”:[[“4c38b50ddf2056a6”,“1c4ab67afdd8396b”]]},{“id”:“4c38b50ddf2056a6”,“type”:“stoptimer-varidelay”,“z”:“435c92a78cd0624d”,“duration”:“2”,“durationType”:“num”,“units”:“Minute”,“payloadtype”:“num”,“payloadval”:“0”,“name”:“”,“reporting”:“last_minute_seconds”,“persist”:true,“ignoretimerpass”:false,“x”:1260,“y”:260,“wires”:[[“ce266fb68dbf7f7c”],[],[]]},{“id”:“969c8814374f4be2”,“type”:“switch”,“z”:“435c92a78cd0624d”,“name”:“T/F”,“property”:“payload”,“propertyType”:“msg”,“rules”:[{“t”:“true”},{“t”:“false”}],“checkall”:“true”,“repair”:false,“outputs”:2,“x”:1030,“y”:220,“wires”:[[“374179a1098fc906”],[“4c38b50ddf2056a6”]]},{“id”:“4c7e0ac11f43998c”,“type”:“rbe”,“z”:“435c92a78cd0624d”,“name”:“”,“func”:“rbe”,“gap”:“”,“start”:“”,“inout”:“out”,“septopics”:true,“property”:“payload”,“topi”:“topic”,“x”:890,“y”:220,“wires”:[[“969c8814374f4be2”]]},{“id”:“756a7f972341f7d3”,“type”:“BooleanLogicUltimate”,“z”:“435c92a78cd0624d”,“name”:“”,“payloadPropName”:“payload”,“filtertrue”:“both”,“persist”:true,“sInitializeWith”:“false”,“triggertopic”:“trigger”,“outputtriggeredby”:“all”,“inputCount”:“3”,“topic”:“result”,“restrictinputevaluation”:false,“delayEvaluation”:“”,“x”:710,“y”:220,“wires”:[[],[“4c7e0ac11f43998c”],[]]},{“id”:“daa23d0f77beee25”,“type”:“change”,“z”:“435c92a78cd0624d”,“name”:“Kon to Bool”,“rules”:[{“t”:“set”,“p”:“payload”,“pt”:“msg”,“to”:“msg.payload= "ON" ? true : false”,“tot”:“jsonata”}],“action”:“”,“property”:“”,“from”:“”,“to”:“”,“reg”:false,“x”:510,“y”:80,“wires”:[[“756a7f972341f7d3”,“a124a9130759d199”]]},{“id”:“ba87fb64d3790cce”,“type”:“mqtt in”,“z”:“435c92a78cd0624d”,“name”:“Laundry Door”,“topic”:“konnectedpro1/binary_sensor/laundry_k_door/state”,“qos”:“2”,“datatype”:“auto”,“broker”:“3f792c51bc3d4765”,“nl”:false,“rap”:true,“rh”:“2”,“inputs”:0,“x”:330,“y”:80,“wires”:[[“daa23d0f77beee25”]]},{“id”:“ec9191788967b74f”,“type”:“mqtt in”,“z”:“435c92a78cd0624d”,“name”:“Garage Motion”,“topic”:“zwave/Garage/Garage_Motion_Switch/113/0/Home_Security/Motion_sensor_status”,“qos”:“2”,“datatype”:“auto”,“broker”:“3f792c51bc3d4765”,“nl”:false,“rap”:true,“rh”:“2”,“inputs”:0,“x”:200,“y”:380,“wires”:[[“d122472e55774fa3”]]},{“id”:“d122472e55774fa3”,“type”:“json”,“z”:“435c92a78cd0624d”,“name”:“”,“property”:“payload”,“action”:“”,“pretty”:false,“x”:390,“y”:380,“wires”:[[“b1abd5127cf4e86f”]]},{“id”:“b1abd5127cf4e86f”,“type”:“change”,“z”:“435c92a78cd0624d”,“name”:“Motion to Bool Zw”,“rules”:[{“t”:“set”,“p”:“payload”,“pt”:“msg”,“to”:“msg.payload.value = 8 ? true : false”,“tot”:“jsonata”}],“action”:“”,“property”:“”,“from”:“”,“to”:“”,“reg”:false,“x”:550,“y”:380,“wires”:[[“756a7f972341f7d3”,“37ff5dbb607ac6dd”]]},{“id”:“68017fd33c832240”,“type”:“change”,“z”:“435c92a78cd0624d”,“name”:“Set Global”,“rules”:[{“t”:“set”,“p”:“payload”,“pt”:“msg”,“to”:“payload.value”,“tot”:“msg”},{“t”:“set”,“p”:“GarageDoor”,“pt”:“global”,“to”:“payload.value”,“tot”:“msg”}],“action”:“”,“property”:“”,“from”:“”,“to”:“”,“reg”:false,“x”:530,“y”:440,“wires”:[[“756a7f972341f7d3”,“2ced50b90b728f51”]]},{“id”:“e6b977708ac0d218”,“type”:“json”,“z”:“435c92a78cd0624d”,“name”:“”,“property”:“payload”,“action”:“”,“pretty”:false,“x”:390,“y”:440,“wires”:[[“68017fd33c832240”]]},{“id”:“8260db5f544cf023”,“type”:“mqtt in”,“z”:“435c92a78cd0624d”,“name”:“Garage Main Tilt”,“topic”:“zwave/Garage/Garage_Main_Tilt/48/0/Any”,“qos”:“2”,“datatype”:“auto”,“broker”:“3f792c51bc3d4765”,“nl”:false,“rap”:true,“rh”:“2”,“inputs”:0,“x”:200,“y”:440,“wires”:[[“e6b977708ac0d218”]]},{“id”:“3f792c51bc3d4765”,“type”:“mqtt-broker”,“name”:“CORE Clean1”,“broker”:“10.10.2.1”,“port”:“1883”,“clientid”:“”,“autoConnect”:true,“usetls”:false,“protocolVersion”:“5”,“keepalive”:“60”,“cleansession”:true,“birthTopic”:“”,“birthQos”:“0”,“birthPayload”:“”,“birthMsg”:{},“closeTopic”:“”,“closeQos”:“0”,“closePayload”:“”,“closeMsg”:{},“willTopic”:“”,“willQos”:“0”,“willPayload”:“”,“willMsg”:{},“userProps”:“”,“sessionExpiry”:“”}]